

Palpable City is a site specific installation that transforms an everyday walk through the city into an exploration of a new tactile landscape. Participants wear a vest outfitted with a GPS, some custom hardware and software, and an array of vibrotactile actuators (vibrating pager motors) that are sewn into the vest. As they walk, they encounter varying vibrotactile patterns--changes in rhythm, location or intensity--dependent upon their location. The tactile 'textures' change in relation to the spatial form of their immediate environment. As they walk, and the shape of the 'empty' space around them changes, participants experience new rhythms of the city as tactile sensations generated by the vest.

Participants don a vest outfitted with an array of tactile actuators (tactors), an iPaq with GPS, plus custom electronics. As they walk around the city, they experience varying vibrotactile patterns on their bodies dependent upon their location.


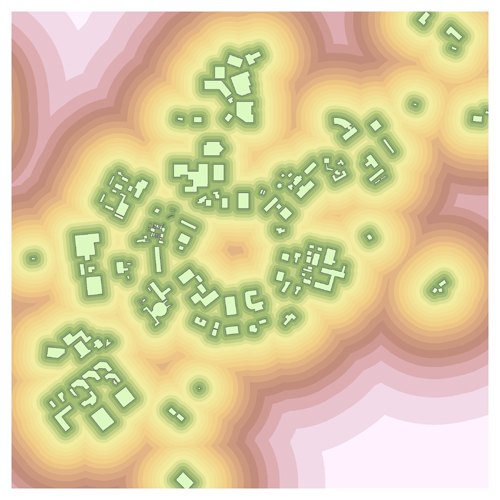
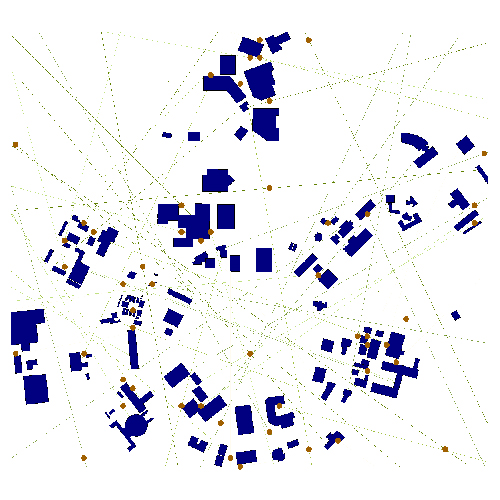
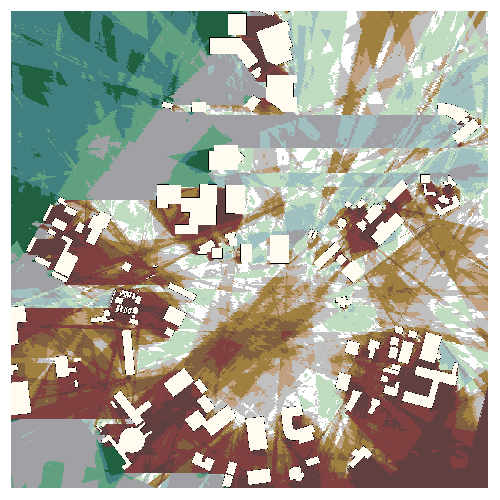
To date, Palpable City has used space syntax-a set of techniques for the analysis of spatial configurations-to genertate maps that play a role in determining locations and changes in vibrotactile patterns. Space syntax started with the work of Bill Hillier and Julienne Hanson in the late 1970s/early 1980s at The Bartlett School, University College London. A wealth of information about space syntax can be found online:
 - the place to start
- the place to startThere is a variety of software available to perform space syntax analysis, most free for academic use. I personally am grateful for:
2007 - Eindhoven, Netherlands

|
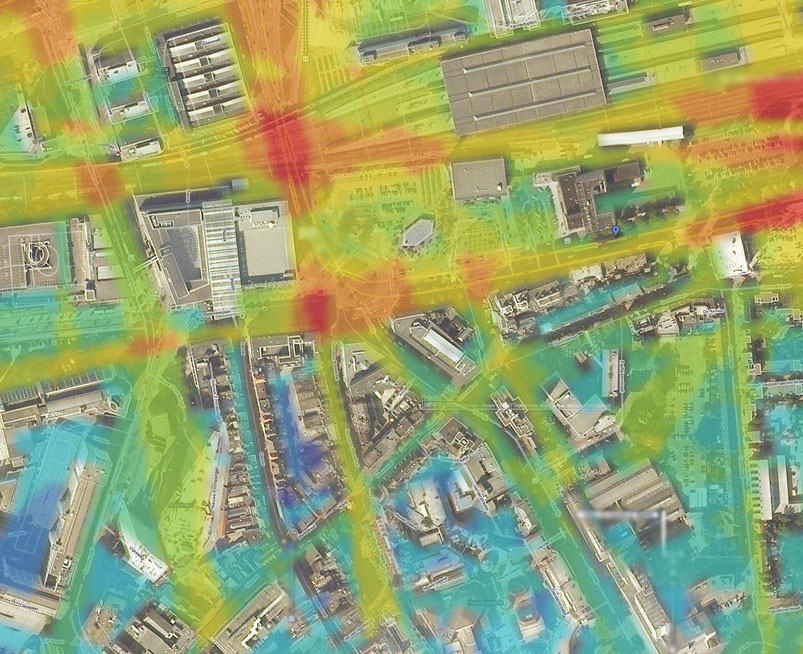
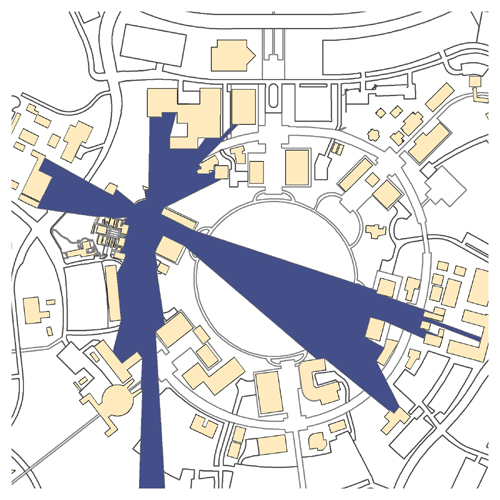
Click the map to explore a virtual tour of Palpable City Eindhoven via Google Maps. The orange line represents a potential walk through the project. Click on the "looker" icons |
TactileSpace system 1.0




Eindhoven map analysis







2005 - University of California Irvine
TactileSpace system version 0.1




maps/sketches









Palpable City explores the relationship between the abstract and
concrete spaces of the city by parameterizing its spaces of
representationÐthe space of architects and urban plannersÐwith
phenomenal space, to challenge our "lust to be a viewpoint" [1] in
understanding the urban experience. The project allows walkers to feel
the spatial form of the urban grid at their location as vibro-tactile
rhythms on their body. Augmenting the everyday activity of walking the city with a
tactile experience challenges participants to think about the
interrelation of vision and touch in their experience of space. The
void of purely optical space is thickened with palpable sensations,
creating a tactile space that can only be explored by moving through
it. Tactile displays are usually applied to provide orientation
information in unusual phenomenal environments, such as virtual
reality, deep sea diving, and zero gravity environments. In Palpable
City, this process is reversed; instead of providing a stable spatial
reference in unusual conditions, the technology is used to make the
usual experience of space unusual.
1. Michel de Certeau. The Practice of Everyday Life, "Walking the City."
There are a number of tactile receptors that could be stimulated for
use in wearable computing applications: thermal, pressure,
electrocutaneous, humidity, air movement, vibrotactile, etc. The
current state of the art points to vibrotactile as the modality for
ubiquitous computing applications. Vibrotactile actuators are neither
intrusive nor painful (problems that are possible with electrocutaneous
actuators). They can be felt through clothing, are inexpensive, and
have relatively low mechanical and power requirements.
A perceptual illusion, sensory saltation, holds promise for use in
vibrotactile displays. Sensory saltation occurs across the senses
resulting in the perception of apparent motion. Tactile sensory
saltation was discovered in the early 1970s by Dr. Frank Geldard at the
Princeton Cutaneous Communication Lab. In a typical setup for eliciting
tactile sensory saltation, three mechanical stimulators are place
equidistant from each other on the forearm. The stimulator closest to
the wrist delivers three short pulses, followed by three more at the
middle stimulator, and finally three more at the last stimulator.
Instead of perceiving three pulses at each of the stimulator sites, the
observer perceives that all of the pulses are distributed with
approximately uniform spacing from the site of the first stimulator to
the site of the third. (Figure 2) The sensation is described as if a
tiny rabbit was hopping up the arm from wrist to elbow, and is
sometimes called the "rabbit" effect or the "cutaneous rabbit." (Figure
1) An important feature of this illusion is that it is able to simulate
higher spatial resolution than the actual number of stimulators, yet
create the impression of a dense stimulator array, thus potentially
reducing the overall weight and power consumption needs of a wearable
device.
Using variations in these parameters in different
spatio-temporal patterns has uncovered a group of concepts which can be
perceived through the tactile sense. For example, a single point can be
perceived as a direction. (van Erp, 2001) Tactors arranged spatially on
the body can create a relationship akin to vision where the ego center
is perceived as one point and the stimulus at another, thus creating
direction. Taking advantage of sensory saltation, lines can be
perceived, as can their length, straightness, spatial distribution and
smoothness. (Cholewiak, 2000) There is also some more recent research
(TNO Human Factors) that suggests planes and three dimension forms can
be perceived. Tactors on the body can create a 360 degree "field of
touch" where lines and forms can be perceived not just on the surface
of the body, but through the body. Finally, the tactile systems that
have been discussed are very easy for users to learn, and require
practically no training.

Figure 1: A Norwegian artist's illustration of the 'cutaneous rabbit'
|
tactile vision+haptic space arises out of concerns about the
ways in which new technologies shape our perceptions of space. The
computer arises from Western scientific ideology which is built upon
the assumption that the mind is separated from the body. The influence
of this assumption is present at all levels of the technology, from the
architectural level in the hardware/software split to the reduced set
of body senses/movements engaged by its interface. The majority of
research in human computer interaction has focused on the visual or
aural modalities. Very little has been focused on the cutaneous senses.
This could be because culturally, the senses of the flesh are regarded
as the most lowly, the most animal. They are the farthest away from
pure reason or thought, a belief upon which computing is founded: the
mind/body split. The mind/body split has been debunked time and time
again from all angles: philosophy, linguistics, biology, neurology,
cognitive science, art, and even computer science (Dourish). However,
embracing what embodiment means is difficult in a language that reifies
the ideology. We talk of "my hand" or "my head" as if they are objects
that we own, not inseparable parts of our being. To describe what is
meant by embodiment, we must use neologisms such as the embodied mind,
being-in-the-world, the life-world, etc. An embodied perspective that
is not clouded by traces of duality is difficult, at best, in
contemporary Western culture. In computer science, where the ideology
is ingrained in the technology itself, it presents an even stiffer
challenge.
As computing produces increasingly influential cultural
artifacts and becomes ingrained in culture, it can no longer disregard
the ideologies that have been responsible for cultural production for
the thousands of years of humanity's existence. The 'arts' (with a
lowercase 'a') have traditionally emphasized body knowledge in the
making of things. Embodied thought is important in the design of
physical spaces (architecture) as well as in the making of objects. As
computing begins to shape physical spaces and their uses, it will be
important to look to the arts and architecture to see where the
underlying assumptions inherent in the discipline conflict with
embodied humanity. tactile vision+haptic space combines technology and
the environment through embodied interaction.
Please refer to the written thesis for citations: [pdf]

© Erik Conrad 1998-2006
 Figure 2: Graphical representation of the saltation illusion
Figure 2: Graphical representation of the saltation illusion